
We address the challenge of enabling robots to manipulate deformable linear objects (DLOs), such as ropes, cables, and rubber bands. Prior work has primarily focused on narrow, task-specific problems, often relying on real-world demonstrations or handcrafted heuristics. Such approaches, however, struggle to scale to the wide variety of materials and tasks encountered in practice, and collecting sufficiently diverse real-world data is often impractical. Additionally, existing simulation environments offer limited support for the broad spectrum of material behaviors necessary for generalizable DLO manipulation. To overcome these limitations, we introduce a differentiable simulator explicitly designed for versatile DLO manipulation. Our simulator models a wide range of material properties—including (in)extensibility, elasticity, bending plasticity, and complex interactions with other objects—providing a robust foundation for learning and evaluating manipulation skills. Building on this simulator, we propose a benchmark suite of representative tasks that highlight the unique challenges of DLO manipulation. The successful execution of these tasks is often hindered by the topological complexity and grasp sensitivity inherent to DLOs. Therefore, we introduce a specialized DLO agent that explicitly manages these challenges by proposing strategic grasping points and decomposing long-horizon tasks to maximize control authority. Finally, we evaluate various policy-learning algorithms using our framework, alongside sim-to-real transfer experiments, demonstrating our platform's potential to advance DLO manipulation.
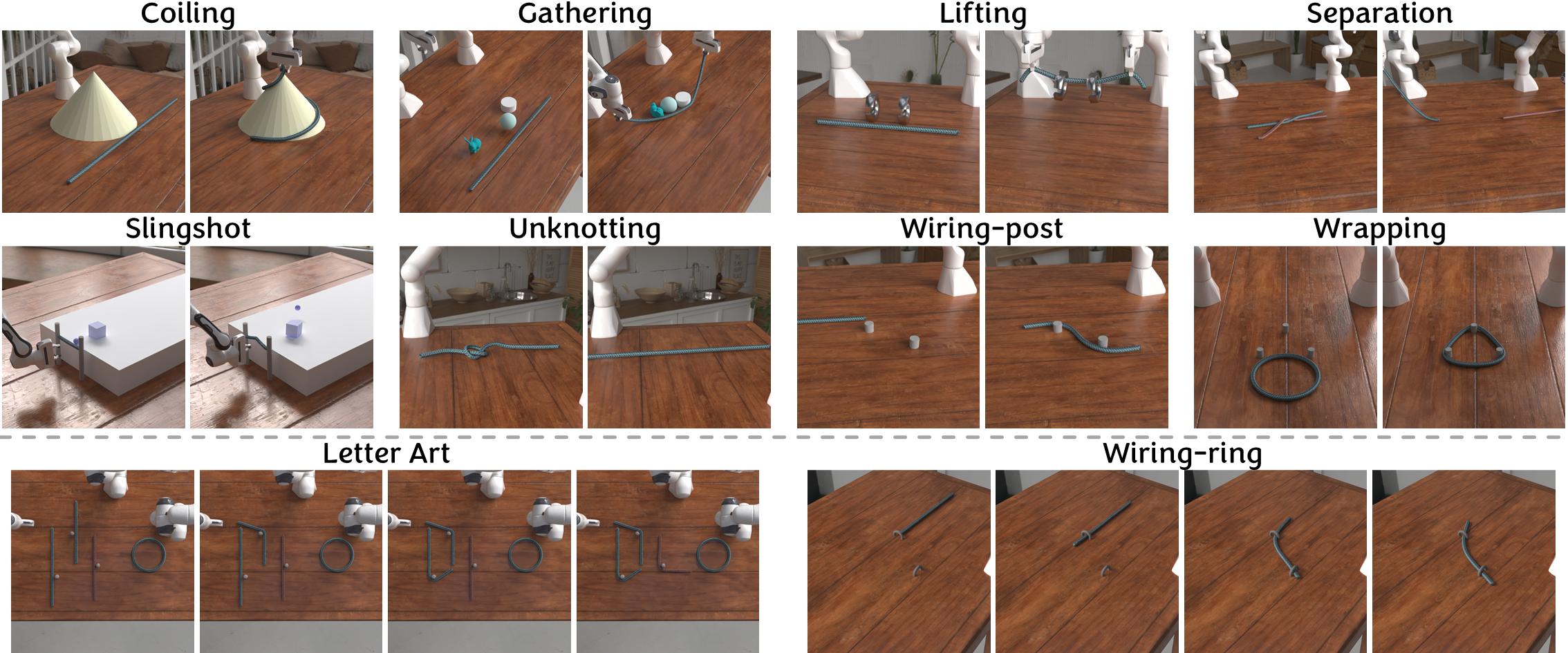
Our benchmark comprises 10 manipulation tasks: 8 fixed-horizon tasks shown on the top and 2 long-horizon tasks displayed on the bottom. The initial and desired goal states for each task are illustrated.
$\triangleright$ Coiling $\triangleleft$
$\triangleright$ Gathering $\triangleleft$
$\triangleright$ Lifting $\triangleleft$
$\triangleright$ Separation $\triangleleft$
$\triangleright$ Slingshot $\triangleleft$
$\triangleright$ Unknotting $\triangleleft$
$\triangleright$ Wiring-post $\triangleleft$
$\triangleright$ Wrapping $\triangleleft$
$\triangleright$ Letter Art $\triangleleft$
$\triangleright$ Wiring-ring $\triangleleft$
$\triangleright$ Open-loop Deployment (Wiring-post) $\triangleleft$
$\triangleright$ Closed-loop Deployment (Wiring-ring) $\triangleleft$
This work was supported by NSF IIS-2441250, NSF IIS-2404386, MURI N000142412748, and NVIDIA’s gift. We thank Yi-Ling Qiao and Minghao Guo for their insightful discussion during the preliminary stage of this work.
@inproceedings{Cao_2026_DLOLab,
author = {Cao, Junyi and Wang, Yian and Xiong, Ziyan and Lin, Chunru and Chen, Zhehuan and Gan, Chuang},
title = {DLO-Lab: Benchmarking Deformable Linear Object Manipulations with Differentiable Physics},
booktitle = {International Conference on Machine Learning (ICML)},
year = {2026}
}This webpage is modified from the template provided here.